Robotics Research Intern
Concordia University Aerospace Robotics Lab (CUARL)
May 2025 — Dec 2025Montreal, QCinternship
Working on CRAWLR (Concordia Robotic Articulated Wheel-Legged Rover), an experimental space-rover platform for push–pull locomotion research in unstructured planetary terrain.
ROS2PythonC++CAN BusGazeboZED SDKArUcoXacro
Key Contributions
ROS2 Control Stack Development
- Integrated ros2_control/ros2_controllers with Virtual CAN workflow using ros2_canopen
- Enabled hardware-identical testing without the physical rover by simulating motor drivers on Gazebo via Virtual CAN
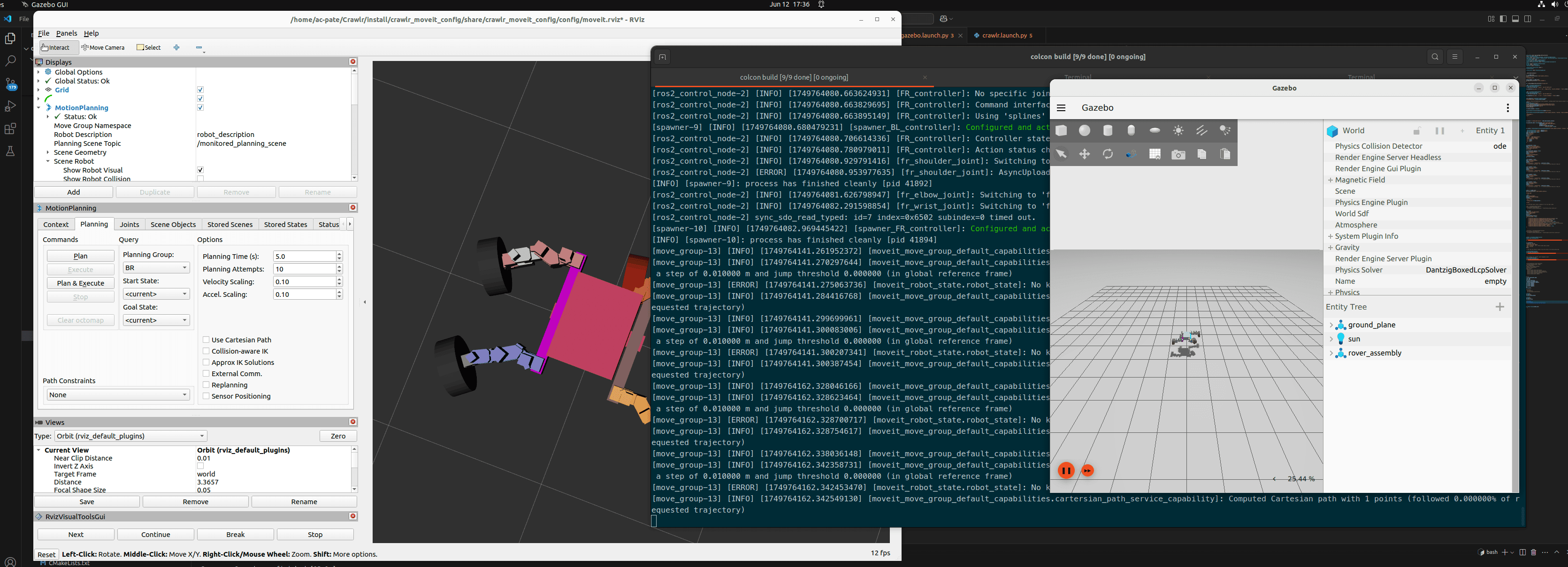
Moveit2/Simulation
- Learned how to do trajectory planning and execution using Moveit2 on fist a simulated robotic arm.
- Transferd that knowledge to integrate motion planning pipeline for the rover simulation
Teleoperation System
- Built complete Xbox joystick teleoperation package - enabling user control of the robot for the very first time
- Pipeline: Joy → Twist → diff-drive/skid-steer solver → Float64MultiArray → CAN
- Validated in Gazebo and on hardware.
Perception System
- Implemented perception-based position estimation for closed-loop experiments
- Used ArUco markers and offboard camera first, then swithing to ZED2/ZED SDK an onboard Jetson AGX Xavier
- Achieved 20–30 Hz estimation with ROS2 message send wirelessly over the network for feedback for closed loop Simulink controller.