
Modern Control Theory — Linear Systems Project
Designed state-feedback controllers and observers for a 2-DOF torsional apparatus simulating satellite docking — ELEC 481 course project.
Overview
Course project for ELEC 481 (Linear Systems) focused on advanced control system design. The challenge: control a 2-DOF torsional apparatus that simulates the dynamics of satellite docking — specifically the torsional stress applied when two spacecraft modules connect.
Grade: 90/100
The Physical System
A laboratory apparatus with two rotating discs connected by a flexible shaft. The dynamics mimic the oscillations and coupling effects you'd see in real spacecraft docking scenarios.
Controllers Implemented
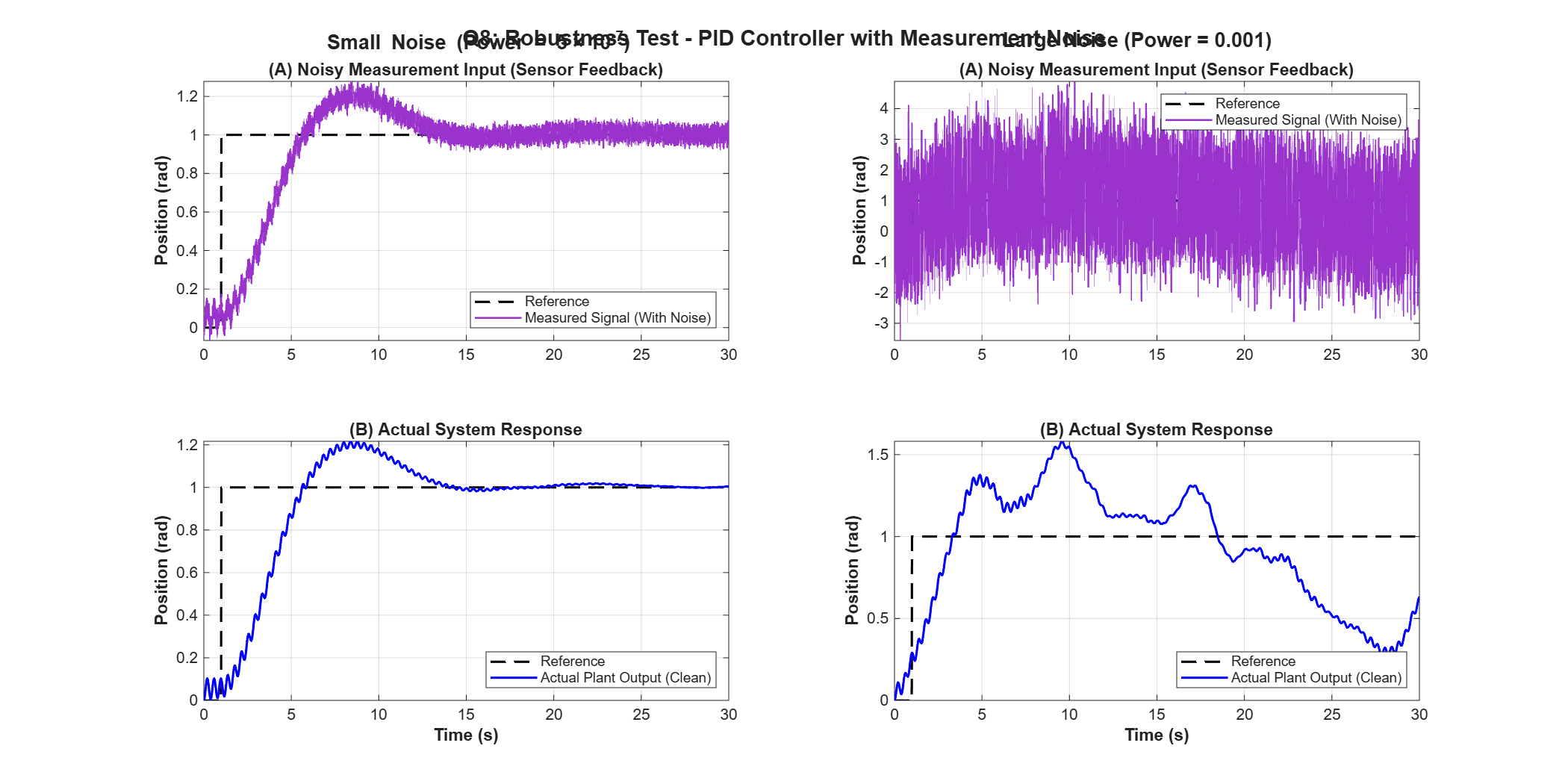
1. PID Controller
Baseline approach — tune proportional, integral, and derivative gains for acceptable performance.
2. State Feedback Controller
Full state feedback using pole placement. Faster response and better damping than PID, but requires all states to be measurable.
3. Full-Order Observer
Estimate all system states from limited measurements. Combined with state feedback for output-only control.
4. Reduced-Order Observer
More efficient observer that only estimates unmeasured states. Faster computation, same control performance.
Technical Stack
- MATLAB: System modeling, controller design, analysis
- Simulink: Real-time simulation and visualization
- State-space methods: Modern control theory throughout
Application Context
Why satellite docking? Because when two modules connect in orbit, the torsional dynamics are critical. Over-aggressive control causes oscillations. Under-damped response causes structural stress. Getting it right requires exactly the kind of controller tuning we practiced in this project.