
Black Copy: Back with Vengeance — Robowars '25
The sequel to my first sumo robot — upgraded with brushless motors, Teensy 4.0, ToF sensors, and proper state machine architecture.
Nov 2024 — May 2025
Personal • Competitioncompleted
Embedded C++Brushless MotorsVESCTeensy 4.0CADAdvanced 3D PrintingState MachineTime of Flight
Overview
Black Copy returns — bigger, faster, and properly engineered. After learning the fundamentals with my first sumo robot, I rebuilt the concept from the ground up with serious upgrades across every subsystem.
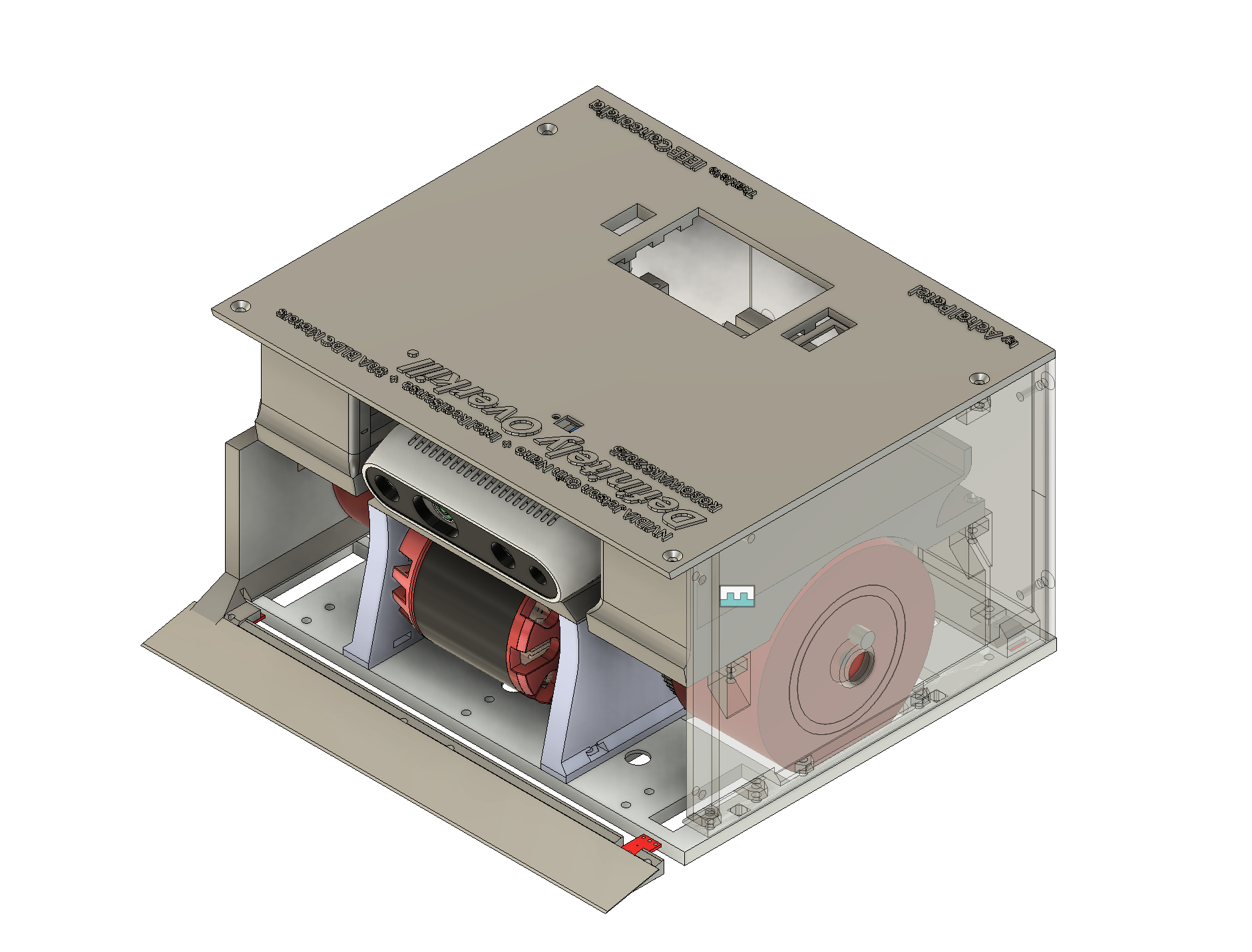
This was one of two robots I entered into Robowars 2025. While Definitely Overkill went the computer vision route, Back with Vengeance focused on doing the fundamentals right: clean state machine logic, responsive sensors, and raw brushless power.
What Changed from Black Copy V1
| Component | V1 (2024) | V2 (2025) |
|---|---|---|
| Motors | Brushed DC | Brushless with VESCs |
| Sensors | Analog IR | Digital Time-of-Flight |
| Controller | Arduino | Teensy 4.0 |
| Code | Ad-hoc logic | Finite State Machine |
| Power | 3s - 12v Lipos | 6s - 24v LiPo with proper fusing |
Technical Details
Mechanical
- Refined CAD design in Fusion 360
- Optimized weight distribution and low center of gravity
- 3D printed chassis with improved tolerances
Electronics
- Brushless motors with VESC speed controllers
- Time-of-Flight sensors for precise distance measurement
- Teensy 4.0 for faster processing and better I/O
- LiPo power system with proper fusing and power distribution
Software
- Finite State Machine architecture for clean, predictable behavior
- Embedded C++ with proper abstractions
- Sensor fusion for opponent detection and tracking
- Communication protocols: UART, SPI, I2C
What I Learned
- Brushless motor control: Understanding VESC configuration, sensorless vs sensored FOC operation, and current limits
- Power systems: LiPo battery management, fusing, and safe discharge rates
- State machines: How to structure embedded code for maintainability and debugging
- Iteration: The value of rebuilding a project with lessons learned